



محصولات مشابه


















مشتریان وفادار
با خرید هر محصول ، امتیاز می گیرید و در خرید های بعدی تخفیف شگفت انگیز دریافت میکنید
سوالی دارید ؟
در مورد این محصول سوالی دارید ؟ با پشتیبانی فروشگاه ما تماس بگیرید ، در خدمتتان هستیم
ارسال رایگان
در صورتی که سبد خرید شما بالای پانصد هزارتومان باشد،ارسال محصول برای شما رایگان میباشد
قوانین و مقررات فروشگاه
لطفا قبل از خرید قوانین و مقررات فروشگاه را با دقت مطالعه فرمایید
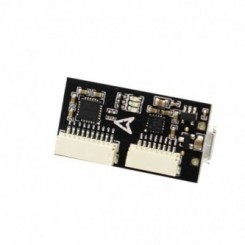
EMAX Femto F3
فلایت کنترل EMAX Femto F3 سایز کوچکی دارد که فقط یک فلایت کنترل نمی باشد بلکه به عنوان PDB نیز مورد استفاده قرار می گیرد .از این فلایت کنترل برای طراحی femtoquad استفاده می شود و همچنین دارای فیلتر رگولاتور 5 ولت LC است که با توجه با سایزش برای استفاده در دوربین و VTx بسیار مناسب است .
فلایت کنترل EMAX Femto F3 دارای پد های LED و بازر می باشد و قادر به استفاده از باتری های LiPo است .
برد این فلایت کنترلر 20*20 میلی متر می باشد .

فلایت کنترلر چیست ؟
در تمام مدل هایی که قبل از کوادکوپتر ها وجود داشتند ، ریموت کنترلی که در دست هدایت کننده قرار داشت به صورت مستقیم با اجزای مختلف مدار کوادکوپتر در ارتباط بود . مثلا افزایش و کاهش سرعت و یا کنترل بال ها توسط کلید های روی ریموت کنترل صورت می گرفت . در این موارد شخص کنترل کننده به راحتی قادر به کنترل پرنده خود می باشد ولی هنگامی که تعداد موتور ها افزایش یابد و حرکت به جهت های مختلف صورت گیرد ، کنترل همزمان این موتور ها توسط یک شخص امکان پذیر نیست . یک کواد کوپتر معمولی به راحتی می تواند تعادل خود را حفظ کند و در جهات مختلف جا به جا شود اما هنگامی که از بیش از سه موتور استفاده کنیم ، برای هر یک از این موتور ها باید یک تراتِل بر روی ریموت قرار گیرد و یک شخص قادر به مدیریت هم زمان موتور ها نخواهد بود .
به همین دلیل برای کنترل یک کوادکوپتر احتیاج به یک مدار کنترل کننده داریم که موتور ها را با یکدیگر هماهنگ کرده و عملیات مورد نظر را انجام دهد . پس دیگر هدایت کننده به طور مستقیم توانایی کنترل کوادکوپتر را نخواهد داشت و توسط ریموت کنترل عملیات مورد نظر را به فلایت کنترل اطلاع می دهد و فلایت کنترل بر اساس دستور دریافتی از خلبان ، عملیات مورد نظر را انجام می دهد پس می توان گفت فلایت کنترل مغز متفکر پرنده می باشد .
در حقیقت یک فلایت کنترلر مداری نسبتا کوچک است که وظیفه آن کنترل و تعیین میزان PRM ( سرعت چرخش موتور بر حسب دور بر دقیقه ) هر موتور است و در هر لحظه با توجه به دستور ارسال شده از خود واکنش می دهد .
ساختن فلایت کنترلر ها تا قبل از پیشرفت الکترونیک دیجیتال و روی کار آمدن میکرو کنترلر ها و میکرو پروسسور ها کار بسیار سخت و دشواری بود . اما امروزه بسیاری افراد با کمی دانش می توانند اقدام به ساخت فلایت کنترلر نمایند .